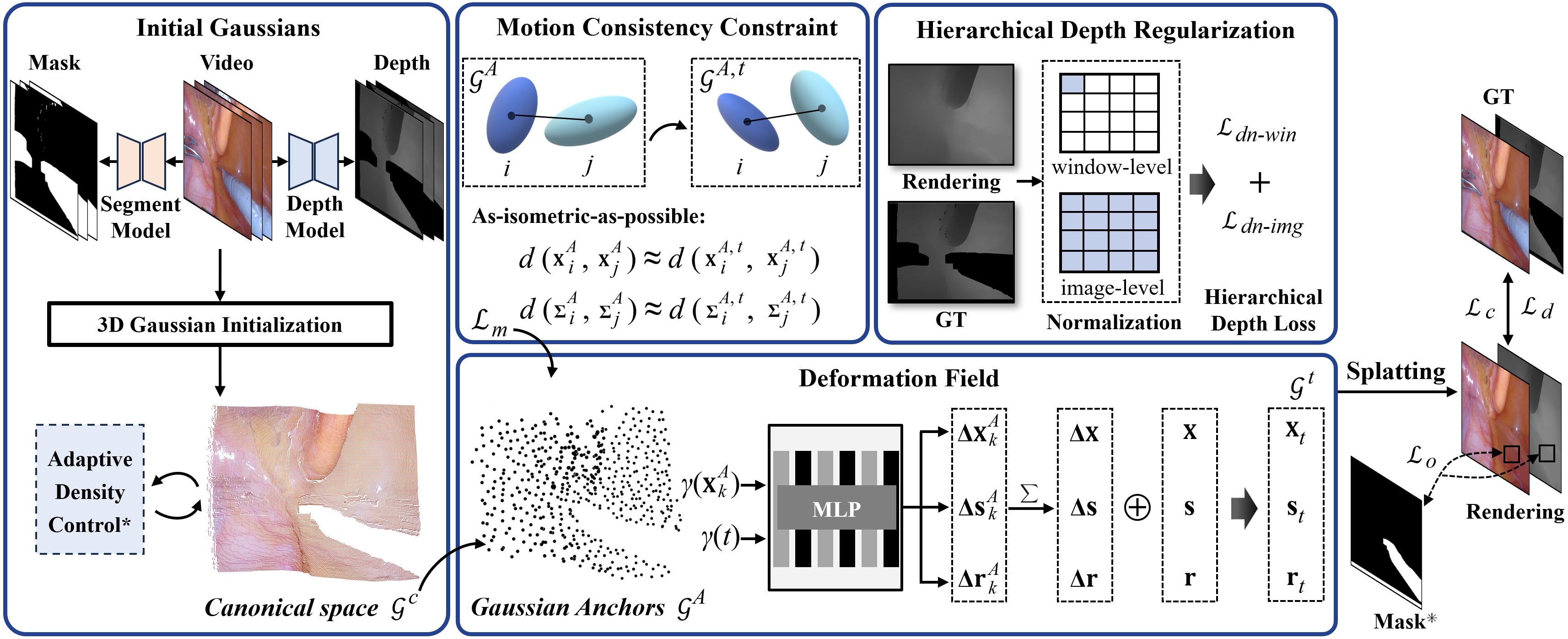
Reconstructing endoscopic videos is crucial due to its potential for robot-assisted surgery and intelligent medical. However, existing methods focus on fast reconstruction, and the reliance on low-rank deformation fields and globally aligned depth supervision often results in suboptimal appearance and noisy depth, leading to fused point clouds suffering from texture blur and surface distortion. To address these issues, we propose Endo-HDR, a framework for high-quality dynamic surgical video reconstruction based on 3D Gaussian splatting (3DGS) technology. Specifically, the surgical scene is decoupled into canonical Gaussians and a Gaussian Anchors (GAs)-based deformation field. We leverage time-varying GAs with a consistency constraint to model complex tissue motion, where an MLP predicts the continuous motion of sparse GAs. The deformation of each Gaussian is then interpolated from its neighboring GAs, easing the learning of deformation. Additionally, since discrete Gaussians are sensitive to small errors, we employ hierarchical depth regularization to learn depth information at both window-level and image-level from sub-regions, enabling the model to reconstruct sharp and accurate depth. To further enhance Endo-HDR's performance, we introduce an efficient Gaussian initialization strategy to generate dense geometric priors in scene initialization phase. We also design a Gaussian growth control strategy to limit the number of Gaussians, ensuring the model’s real-time rendering capability. Experimental results on the EndoNeRF, StereoMIS and Hamlyn datasets demonstrate that Endo-HDR outperforms existing methods in both realistic rendering and accurate depth reconstruction.
EndoNeRF: Neural Rendering for Stereo 3D Reconstruction of Deformable Tissues in Robotic Surgery.
Forplane: Efficient Deformable Tissue Reconstruction via Orthogonal Neural Plane.
Deform3DGS: Deform3DGS: Flexible Deformation for Fast Surgical Scene Reconstruction with Gaussian Splatting.
Endo-4DGS: Endo-4DGS: Endoscopic Monocular Scene Reconstruction with 4D Gaussian Splatting.
SurgicalGaussian: SurgicalGaussian: Deformable 3D Gaussians for High-Fidelity Surgical Scene Reconstruction.
Three datasets: EndoNeRF dataset, StereoMIS dataset and Hamlyn dataset.
If you find this work helpful, you can cite our paper as follows:
@article{xie2025endo,
author = {Xie, Weixing and Ye, Ying and Hong, Qingqi and Yao, Junfeng and Wu, Shaoqi and Zhou, Rongzhou and Dong, Xiao and Guo, Xiaohu},
title = {Endo-HDR: Dynamic Endoscopic Reconstruction with Deformable 3D Gaussians and Hierarchical Depth Regularization},
journal = {Knowledge-Based Systems},
pages = {114914},
year = {2025},
publisher = {Elsevier}
}If you have any questions or feedbacks, please contact Weixing Xie (xwxxmu@gmail.com).